


© Tom Künzli



Questions sur les voitures autonomes
Les voitures autonomes représentent un immense potentiel de développement.
Nous aideront-elles à maîtriser les défis de la politique des transports?
Ou engendreront-elles une déferlante de trafic?
Notre brochure explique quelles sont les conditions-cadre nécessaires afin que ces nouveaux moyens de transport soient utiles pour la société.
Vous trouverez des informations plus détaillées dans ce document ainsi que des réponses aux questions les plus fréquemment posées dans le Q&A ci-joint.
Définitions
Font partie de la catégorie des véhicules autonomes tous les véhicules motorisés homologués dans l’espace routier public dont la conduite est pilotée entièrement ou partiellement par des systèmes techniques. Les médias utilisent aussi le terme de véhicules automatisés, de véhicules sans conducteur ou de de véhicules à délégation de conduite. En anglais ces moyens de transport sont appelés « automated vehicle » (ou « autonomous vehicle »), abrégé « AV », en français VA pour véhicule autonome.
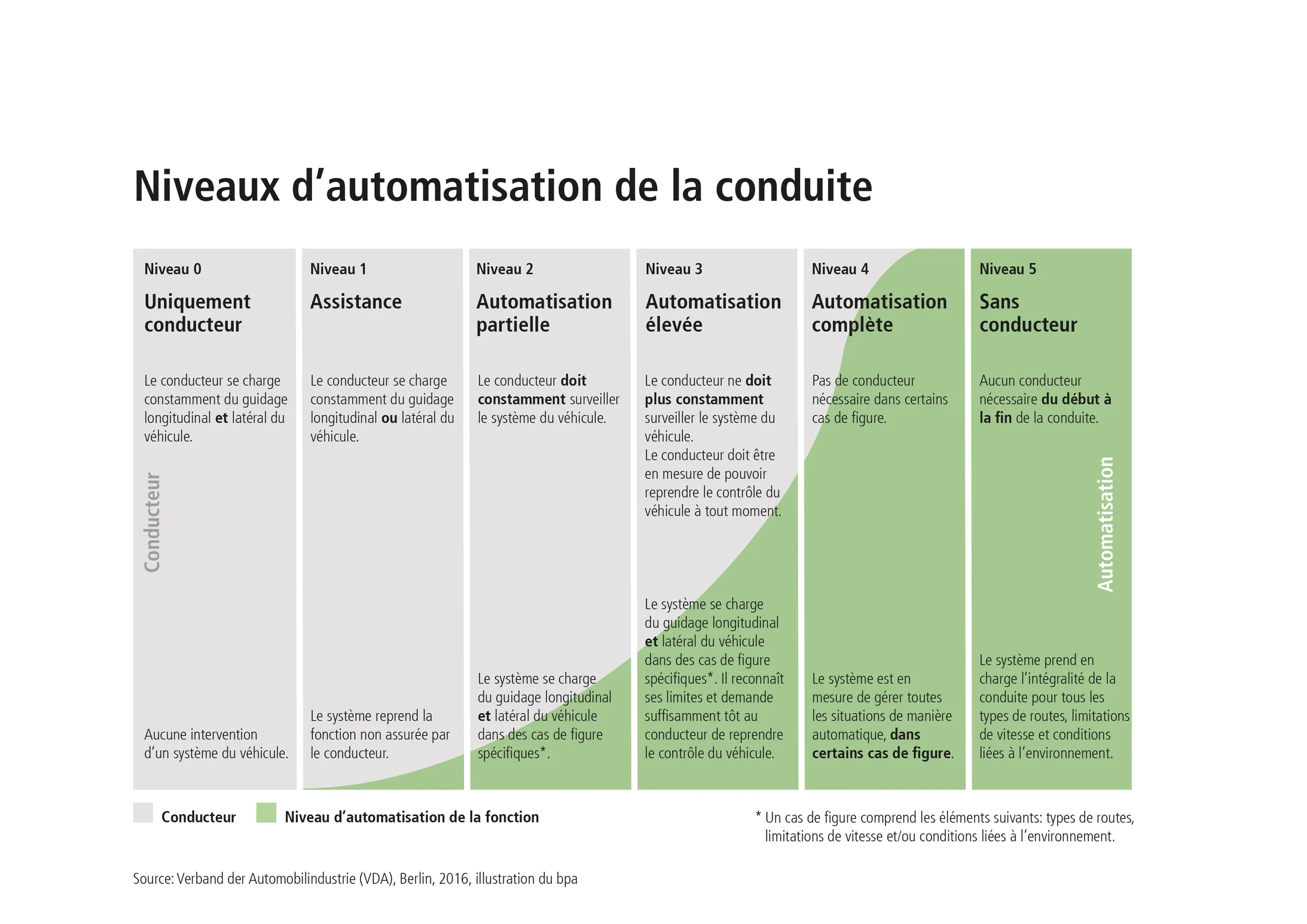
Il existe diverses classifications du degré d’automatisation. La plus usuelle est la classification SAE établie par l’Association internationale des ingénieurs automobiles (Society of Automobile Engineers). L’automatisation est divisée en six étapes (degrés 0 à 5) (voir l’illustration 1). Les différentes étapes se distinguent par l’attribution de la conduite dynamique soit au conducteur / à la conductrice, soit au système.
Conducteur Degré d’automatisation (assistance au conducteur)
*Les applications comprennent les types de routes, les domaines de vitesse et les conditions environnantes.
Etape 0 : conducteur uniquement ; étape 1: avec assistance; étape 2 : automatisation partielle; étape 3 : forte automatisation ; étape 4 : automatisation complète ; étape 5 : sans conducteur·trice
Etape 0 : Le conducteur est en tout temps responsable de la direction longitudinale et transversale.
Le système n’intervient pas activement. Le conducteur garde le contrôle global.
Etape 1 : Le conducteur est tout temps responsable de la direction longitudinale ou transversale.
Le système prend en charge l’autre fonction.
Etape 2 : Le conducteur doit à tout moment contrôler le système.
Le système prend en charge la direction longitudinale et transversale dans une application particulière (fonctions combinées).*
Etape 3 : Le conducteur ne doit plus tout le temps surveiller le système.
Le conducteur doit être potentiellement capable de reprendre le contrôle.
Le système prend en charge la direction longitudinale et transversale dans une application particulière.* Le système doit savoir reconnaitre ses limites et en appeler au conducteur d'être en mesure de reprendre le contrôle dans un temps acceptable.
Etape 4 : Aucun conducteur n’est requis pour l’application particulière.
Le système est capable de faire face automatiquement à toutes les situations pouvant surgir pour une application particulière.
Etape 5 : Aucun conducteur n’est requis pour le trajet depuis le point de départ jusqu’à la destination.
Le système est entièrement en charge de la conduite pour tous les types de route, domaines de vitesse et conditions environnantes.
Illustration 1 : Organisation internationale des constructeurs automobiles, 2015
Il faut distinguer deux termes en relation avec la mobilité partagée :
- Lors de l’autopartage, différentes personnes utilisent la même voiture à la suite.
- Lors du covoiturage (aussi appelé Ride-Sharing ou «car-pooling»), plusieurs passagers·ères utilisent un véhicule en même temps. Le point de départ ou de destination ne sont pas forcément identiques pour toutes et tous.
Les véhicules autonomes sont souvent perçus comme une possibilité de donner un plus grand essor à la mobilité partagée. C’est pourquoi les deux sujets sont souvent abordés ensemble.
La mobilité en tant que service ou en anglais Mobility as a Service (MaaS) est une nouvelle conception de la mobilité qui pourrait se situer à l’intersection entre les transports publics (TP) et le trafic individuel motorisé (TIM). L’offre de mobilité ne serait plus liée à une ligne donnée ou à un horaire fixe. Les véhicules circuleraient à la demande et là où ils pourraient desservir un nombre maximal de passagers·ères. Le trajet désiré serait organisé par le biais d’une plateforme commune (application). L’offre serait adaptée à la demande et la procédure de paiement en serait simplifiée d’autant.
Impact sur la société
En Suisse, les premiers véhicules autonomes circulent déjà à Fribourg, Sion et Zoug. Les estimations sur le moment de leur introduction à large échelle diffèrent cependant largement. Les premiers véhicules totalement automatisés devraient être autorisées sur les voies publiques au début des années 2020.
Les estimations les plus optimistes issues de la recherche tablent sur le fait que déjà en 2030 tous les véhicules seront autonomes. Cependant de nombreuses défaillances techniques doivent trouver une solution et les conditions légales et administratives être clarifiées avant que des véhicules autonomes ne soient autorisés sur les voies publiques. Le Conseil fédéral estime que ces véhicules constitueront une grande partie du trafic routier dans les 15 à 20 ans à venir.
Les premiers véhicules autonomes en Suisse apparaitront probablement pour les transports publics, car un bus emprunte toujours le même trajet. La Suisse devra toutefois attendre les développements européens en matière de trafic individuel. On peut s’attendre à ce que les véhicules complètement automatisés soient d’abord autorisés sur les autoroutes, car les interactions entre véhicules n’ont lieu que lors des entrées et sorties ainsi qu’en cas de dépassement.
Diverses questions éthiques doivent encore être clarifiées avant l’introduction de véhicules autonomes. Par exemple la question du comportement d’un véhicule autonome au cas où une collision avec un autre usager·ère de la route est inévitable. La priorité doit-elle être accordée à la survie du l’occupant·e du véhicule autonome ou de la survie du·de la piéton·n·e en danger ? Cette décision devrait-elle prise par un algorithme ? Et qui décide de la programmation dudit algorithme ? Cette question n’a pas encore trouvé de réponse. La résolution de ce « dilemme éthique » demandera du temps et pourrait retarder l’introduction d’un système de véhicules autonomes par ailleurs favorable à la société.
À l’heure actuelle, plus de 90% des accidents routiers sont dus à l’erreur humaine. (NHTSA, 2008; Conseil fédéral, 2016). Les véhicules autonomes amélioreront la sécurité grâce par exemple au système d’assistance au conducteur / à la conductrice, des temps de réaction plus rapides et une mise en réseau complète des véhicules entre eux.
Les véhicules autonomes sont programmés de manière à être les plus sûrs possibles, mais il y aura toujours des accidents à l’avenir. La numérisation et l’automatisation de la mobilité entraînent d’autres risque, tels que défaillances des machines, du logiciel ou de piratage des données. Quant aux véhicules partiellement automatisés, la transmission de la direction entre l’homme et le véhicule est perçue comme générant potentiellement des accidents.
Le potentiel de l’automation ne pourra être exploité qu’une fois que les véhicules seront mis en réseau entre eux. Il en résultera automatiquement une grande quantité de données concernant par exemple le profil de déplacement des véhicules et de leurs passagers. Ceci pose problème par rapport à la protection des données. Une base légale sera nécessaire pour relever et utiliser ces données. Il s’agit également de clarifier l’échange des données entre les voitures de différents fabricants de voitures et de logiciels.
Qui porte la responsabilité civile lors d’un accident?
Si le système est en charge du pilotage, le·la conducteur·trice ne saurait être tenu·e responsable du comportement du véhicule dans la circulation. On peut donc s’attendre à ce que la question du recours en responsabilité dans la chaîne de production (fabricants de voitures et de navigateurs ou gérants des infrastructures) gagnent en importance (Litman, 2018). La question de la responsabilité civile lors d’un accident est donc encore en suspens et il appartient au législateur de clarifier la question.
Impact sur le trafic
De quelle manière les véhicules autonomes influenceront-ils notre mobilité?
La mise en œuvre de véhicules autonomes aura un impact important sur la demande de trafic. En voilà les raisons:
- Utilisation du temps de parcours : le pilotage du véhicule étant pris en charge par le système, le·la conducteur·trice peut se consacrer à d’autres activités (plus productives).
- Nouveaux groupes d’usagers·ères : Les mineurs de moins de 18 ans, les seniors et les personnes sans permis pourront à l’avenir circuler en voiture.
- Trajets à vide : Dans les véhicules entièrement automatisés, il n’y a plus besoin d’un conducteur. Des trajets à vide en résulteront.
- Demande induite : L’automatisation permet de mieux exploiter les infrastructures routières existantes, ce qui augmente les capacités et génère ainsi un accroissement du volume de trafic total.
Les pronostics sur le kilométrage futur varient beaucoup (nombre de kilomètres parcourus en véhicule). On distingue deux courants de pensée principaux:
- Utilisation privée : Le véhicule continue à être un bien privé utilisé individuellement. L’introduction de véhicules autonomes dans un tel contexte générerait plus de trafic suite à des temps de parcours productifs, des trajets à vide, de nouveaux groupes d’usagers·ères et une demande induite. Les estimations vont jusqu’à un triplement du trafic.
- Utilisation publique : Le besoin d’une voiture individuelle disparaitrait peu à peu, de sorte que dans une situation idéale, à la fin, seuls des « taxis » entièrement automatisés subsisteraient. Il serait possible de satisfaire la demande actuelle en déplacements avec 80% de véhicules en moins.
Les véhicules autonomes offrent un potentiel de réduction important pour la consommation d’énergie, les émissions de bruit et de substances nocives. Dû à des processus d’accélération et de freinage plus doux et la fluidification généralisée du trafic, les véhicules autonomes produisent moins d’émissions par rapport aux voitures d’aujourd’hui. Pour autant que l’automation et l’électromobilité soient harmonisées entre elles, ce qui réduirait les émissions en service.
Les économies en espace pourraient être substantielles : les véhicules autonomes s’adaptent de manière optimale aux routes, ce qui permet des rayons de virage plus étroits, des voies moins larges ou des places de stationnement plus petites. La réaffectation des actuelles places de stationnement permettrait un gain d’espace particulièrement conséquent. Des pronostics estiment qu’il serait ainsi possible de gagner 15 à 20% de place en ville. Tout ceci à condition que les places de stationnement ne soient pas remplacées à l’avenir par des trajets à vide.
Les véhicules autonomes ne nécessitant pas de conducteur·trice, un grand facteur de coûts disparaît, ce qui permet aux flottes de taxis de devenir nettement meilleur marché. Déjà aujourd’hui, on observe que la voiture perd de son prestige alors que l’accès à la mobilité est valorisé. Des offres attrayantes et bon marché renforceront encore cette tendance à l’avenir.
Le respect de la sphère privée est toujours un sujet d’actualité. Nombreuses sont les personnes qui écoutent de la musique ou passent des coups de téléphone dans leur voiture, ce qui va parfaitement dans le sens du développement des voitures autonomes, qui offrent la possibilité d’un salon ou d’un bureau mobile. Les véhicules privés offrent en outre l’avantage de pouvoir entreposer des objets personnels dans le coffre et de pouvoir équiper la voiture en fonction de ses propres préférences.
Les effets des véhicules autonomes sur la mobilité douce dépendent surtout de la manière d’introduire les voitures-robots et de l’évolution de la quantité de trafic sur les routes urbaines. En principe la sécurité routière générale s’améliorera, ce qui avantagera en particulier les cyclistes et les piéton·ne·s qui sont les usagers les plus vulnérables dans l’espace routier. En outre, il existe un réel potentiel d’accorder davantage de place aux piéton·ne·s et aux cyclistes, puisque les véhicules autonomes nécessitent moins de places de stationnement ainsi que des voies de circulation moins larges.
actif-trafiC demande que les véhicules autonomes :
- ne génèrent pas de trafic supplémentaire.
- améliorent l’efficacité du système de transport.
- rendent superflu l’extension des infrastructures routières,
- minimisent les impacts négatifs du trafic sur la santé humaine et l’environnement.
- créent de la place pour la mobilité piétonne et cycliste.